Tarik Tosun

Research Interests: Modular Robotics
Office: Pennovation Center, 3rd Floor
Email: tarikt at seas.upenn.edu
Personal Page
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) C. Liu, T. Tosun, and M. Yim, “A low-cost, highly customizable solution for position estimation in modular robots,” Journal of mechanisms and robotics, 2021.
C. Liu, T. Tosun, and M. Yim, “A low-cost, highly customizable solution for position estimation in modular robots,” Journal of mechanisms and robotics, 2021.
[Bibtex]@article{CL:TT:MY:21, author = {Chao {Liu} and Tarik {Tosun} and Mark {Yim}}, title = {A Low-Cost, Highly Customizable Solution for Position Estimation in Modular Robots}, journal = {Journal of Mechanisms and Robotics}, year = 2021, doi = {10.1115/1.4050249}, pdf = {https://arxiv.org/abs/2201.03719} } - G. Jing, T. Tosun, M. Yim, and H. Kress-Gazit, “Accomplishing high-level tasks with modular robots,” Autonomous robots, 2018.
[Bibtex]@Article{GJ:TT:MY:HK:auro:18, title={Accomplishing High-Level Tasks with Modular Robots}, author={Jing, Gangyuan and Tosun, Tarik and Yim, Mark and Kress-Gazit, Hadas}, Journal={Autonomous Robots}, year={2018}, DOI={10.1007/s10514-018-9738-1}, pdf={https://arxiv.org/abs/1712.02299}, } - J. Daudelin, G. Jing, T. Tosun, M. Yim, H. Kress-Gazit, and M. Campbell, “An integrated system for perception-driven autonomy with modular robots,” Science robotics, 2018.
[Bibtex]@Article{JD:GJ:TT:MY:HK:MC:18, title={An Integrated System for Perception-Driven Autonomy with Modular Robots}, author={Daudelin, Jonathan and Jing, Gangyuan and Tosun, Tarik and Yim, Mark and Kress-Gazit, Hadas and Campbell, Mark}, Journal={Science Robotics}, pdf={http://robotics.sciencemag.org/cgi/content/full/3/23/eaat4983?ijkey=iBq7yW7Z8vmjE&keytype=ref&siteid=robotics}, year={2018} } - T. Tosun, J. Daudelin, G. Jing, H. Kress-Gazit, M. Campbell, and M. Yim, “Perception-informed autonomous environment augmentation with modular robots,” in Ieee international conference on robotics and automation, 2018.
[Bibtex]@inproceedings{TT:JD:GJ:HK:MC:MY:icra:18, title={Perception-Informed Autonomous Environment Augmentation With Modular Robots}, author={Tosun, Tarik and Daudelin, Jonathan and Jing, Gangyuan and Kress-Gazit, Hadas and Campbell, Mark and Yim, Mark}, booktitle={IEEE International Conference on Robotics and Automation}, pdf={https://arxiv.org/abs/1710.01840}, year={2018} } - G. Jing, T. Tosun, M. Yim, and H. Kress-Gazit, “An end-to-end system for accomplishing tasks with modular robots: perspectives for the ai community,” in International joint conference on artificial intelligence, 2017.
[Bibtex]@inproceedings{GJ:TT:MY:HK:ijcai:17, title={An End-to-End System for Accomplishing Tasks with Modular Robots: Perspectives for the AI community}, author={Jing, Gangyuan and Tosun, Tarik and Yim, Mark and Kress-Gazit, Hadas}, booktitle={International Joint Conference on Artificial Intelligence}, pdf={http://static.ijcai.org/proceedings-2017/0686.pdf}, year={2017} } - T. Tosun, D. Edgar, C. Liu, Tsabedze Thulani, and M. Yim, “Paintpots: low cost, accurate, highly customizable potentiometers for position sensing,” in Ieee international conference on robotics and automation, 2017.
[Bibtex]@InProceedings{TT:DE:CL:TT:MY:17, title = {PaintPots: Low Cost, Accurate, Highly Customizable Potentiometers for Position Sensing}, author = {Tosun, Tarik and Edgar, Daniel and Liu, Chao and Tsabedze, Thulani, and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/10/tosun2017paintpots.pdf}, year = 2017 } - N. Eckenstein, T. Tosun, and M. Yim, “Self-reconfigurable modular connection systems,” in Proc. of intl/ workshop on robot modularity at the ieee/rsj intelligent robots and systems (iros), 2016.
[Bibtex]@inproceedings{NE:TT:MY:16, title={Self-reconfigurable Modular Connection Systems}, author={Eckenstein, Nick and Tosun, Tarik and Yim, Mark}, booktitle={Proc. of Intl/ Workshop on Robot Modularity at the IEEE/RSJ Intelligent Robots and Systems (IROS)}, year={2016}, } - T. Tosun, J. Davey, C. Liu, and M. Yim, “Design and characterization of the ep-face,” in 2016 ieee/rsj international conference on intelligent robots and systems (iros), 2016.
[Bibtex]@inproceedings{TT:JD:CL:MY:16, title={Design and Characterization of the EP-Face}, author={Tosun, Tarik and Davey, Jay and Liu, Chao and Yim, Mark}, booktitle={2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, year={2016}, pdf={http://modlabupenn.org/wp-content/uploads/tosun2016epface.pdf} } - G. Jing, T. Tosun, M. Yim, and H. Kress-Gazit, “An end-to-end system for accomplishing tasks with modular robots,” in Proceedings of robotics: science and systems, 2016.
[Bibtex]@inproceedings{GJ:TT:MY:HK:16, title={An End-to-End System for Accomplishing Tasks with Modular Robots}, author={Jing, Gangyuan and Tosun, Tarik and Yim, Mark and Kress-Gazit, Hadas }, booktitle={Proceedings of Robotics: Science and Systems}, year={2016}, pdf={http://modlabupenn.org/wp-content/uploads/jing2016system.pdf} } - T. Tosun, G. Jing, H. Kress-Gazit, and M. Yim, “Computer-aided compositional design and verification for modular robots,” in Ifrr international symposium on robotics research, 2015.
[Bibtex]@inproceedings{TT:GJ:HK:MY:15, title={Computer-Aided Compositional Design and Verification for Modular Robots}, author={Tosun, Tarik and Jing, Gangyuan and Kress-Gazit, Hadas and Yim, Mark}, booktitle={IFRR International Symposium on Robotics Research}, year={2015}, pdf={http://modlabupenn.org/wp-content/uploads/tosunEtAl2015.pdf} } - J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
[Bibtex]@ARTICLE{JP:NE:TT:JS:JD:JG:VK:MY:15, author={Paulos, J. and Eckenstein, N. and Tosun, T. and Seo, J. and Davey, J. and Greco, J. and Kumar, V. and Yim, M.}, journal={Automation Science and Engineering, IEEE Transactions on}, title={Automated Self-Assembly of Large Maritime Structures by a Team of Robotic Boats}, year={2015}, month={July}, volume={12}, number={3}, pages={958-968}, keywords={Assembly;Boats;Computers;Planning;Robots;Trajectory;Winches;Autonomous surface craft;modular construction;modular robot;multirobot systems;self-assembly;self-reconfigurable}, doi={10.1109/TASE.2015.2416678}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_automated_self_assembly_TASE_2015.pdf}, ISSN={1545-5955} } - Y. Mantzouratos, T. Tosun, Khanna Sanjeev, and M. Yim, “On embeddability of modular robot designs,” in Ieee international conference on robotics and automation, 2015.
[Bibtex]@inproceedings{YM:TT:SK:MY:15, title={On Embeddability of Modular Robot Designs}, author={Mantzouratos, Yannis and Tosun, Tarik and Khanna, Sanjeev, and Yim, Mark}, booktitle={IEEE International Conference on Robotics and Automation}, year={2015}, pdf={http://modlabupenn.org/wp-content/uploads/MantzouratosEtAl_ICRA2015_Final.pdf} } - I. O’Hara, J. Paulos, J. Davey, N. Eckenstein, N. Doshi, T. Tosun, J. Greco, J. Seo, M. Turpin, V. Kumar, and M. Yim, “Self-assembly of a swarm of autonomous boats into floating structures,” in 2014 ieee international conference on robotics and automation (icra 2014), 2014.
[Bibtex]@INPROCEEDINGS{IO:JP:JD:NE:ND:TT:JG:JS:MT:VK:MY:14:5, author={O'Hara, Ian and Paulos, James and Davey, Jay and Eckenstein, Nick and Doshi, Neel and Tosun, Tarik and Greco, Jonathan and Seo, Jungwon and Turpin, Matt and Kumar, Vijay and Yim, Mark}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA 2014)}, title={Self-Assembly of a Swarm of Autonomous Boats into Floating Structures}, doi={10.1109/ICRA.2014.6907011}, year={2014}, month={June}, pdf={http://modlabupenn.org/wp-content/uploads/ieee_copyright_overlay_dtemp.pdf}, }
Projects
Autonomous Modular Robots

The theoretical ability of modular robots to reconfigure in response to complex tasks in a priori unknown environments has frequently been cited as an advantage and remains a major motivator for work in the field. We present a modular robot system capable of autonomously completing high-level tasks by reactively reconfiguring to meet the needs of …
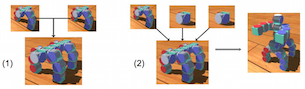
Environment Augmentation with Modular Robots
We present a system enabling a modular robot to autonomously build structures in order to accomplish high-level tasks. Building structures allows the robot to surmount large obstacles, expanding the set of tasks it can perform. This addresses a common weakness of modular robot systems, which often struggle to traverse large obstacles. This paper presents the …
PaintPots
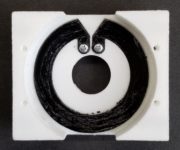
The PaintPot manufacturing process is a new way to create low-cost, low-profile, highly customizable potentiometers for position sensing in robotic applications. It uses widely accessible materials, requires no special expertise, and creates custom potentiometers in a variety of shapes and sizes, including curved surfaces.
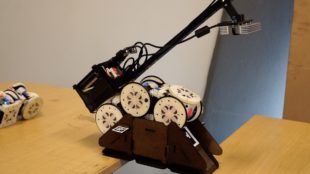
The EP-Face Connector
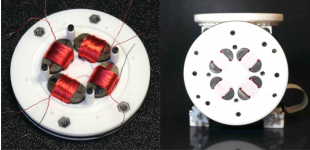
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high- strength (88.4N), compact, fast, power efficient, and robust to position errors.
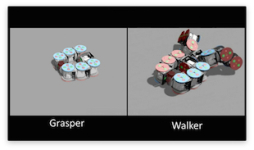
An End-to-End System for Accomplishing Tasks with Modular Robots
Best Systems Paper, RSS 2016. In this paper, we present an end-to-end system for addressing tasks with modular robots, and demonstrate that it is capable of accomplishing challenging multi-part tasks in hardware experiments.
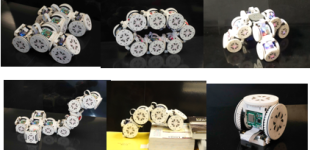
SMORES-EP

SMORES-EP is a modular robot designed and built at the University of Pennsylvania, and used by researchers at Penn and Cornell. SMORES stands for Self-Assembling MOdular Robot for Extreme Shapeshifting, and EP refers to the Electro-Permanent magnets the modules use to connect.
Computer-Aided Compositional Design and Verification for Modular Robots
To take full advantage of the flexibility of a modular robot system, users must be able to create and verify new configurations and behaviors quickly. We have developed a design framework that facilitates rapid creation of new configurations and behaviors through composition of existing ones, and tools to verify configurations and behaviors as they are …
Read more "Computer-Aided Compositional Design and Verification for Modular Robots"
Modular Robot Design Embedding
We have developed an algorithm that automatically detects embeddability of modular robot configurations. Simply put, a given design embeds another design if it can replicate its structure, and therefore simulate its functionality. We introduce a novel graph representation for modular robots, and formalize the notion of embedding through topological and kinematic conditions. Our algorithm involves …
Tactically Expandable Maritime Platform (T.E.M.P.)
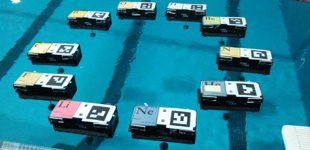
We have built a system of shipping container sized robotic boats that can hook onto each other. We demonstrate the conceptual design of a system that is capable of constructing bridges and various shaped islands that can be made compliant to waves.