
Welcome to the Modular Robotics Lab (ModLab), a subgroup of the GRASP Lab and the Mechanical Engineering and Applied Mechanics Department at the University of Pennsylvania under the supervision of Prof. Mark Yim.
A modular robot is a versatile system consisting of many simple modules that can change their configuration to suit a given task. These systems are inherently robust due to their redundancy, adaptability, and ability to self-repair. While originally focused on continuing research in the field of modular robotics, recent work at the lab has expanded to include micro/nano air vehicles, bio-inspired gaits, personal robots, and more. The ModLab is comprised of undergraduate and graduate students from multiple disciplines including mechanical, electrical, and computer systems engineering.
Featured Projects
IceBot: A Robot Made from Ice
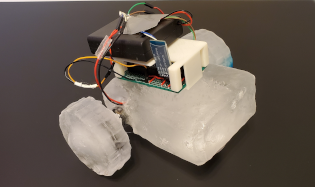
IceBot is the first robot made from ice, as confirmed by the Guinness World Records team. We intend for the robot to operate in harsh, remote, sub-zero environments like Antarctica and even further away, Saturn’s moon Enceladus for example. As the structural components of the robot are made from ice, when operating in these environments …
Variable Topology Truss
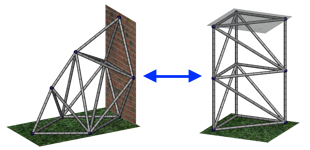
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This page is the overall page for all VTT-related research. …
Quori: A Community-Driven Modular Research Platform for Sociable Human-Robot Interaction
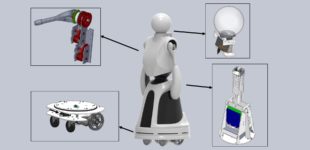
Quori is a novel, affordable, socially interactive robot platform for enabling non-contact human-robot interaction (HRI) research in both in-lab and “in the wild” experimental settings. The package will be complete with an expressive projected face, two gesturing arms, bowing spine, and an omnidirectional base. Software is provided at the low-level to control the hardware and at the high-level, provided by Semio, to easily generate versatile social behaviors.