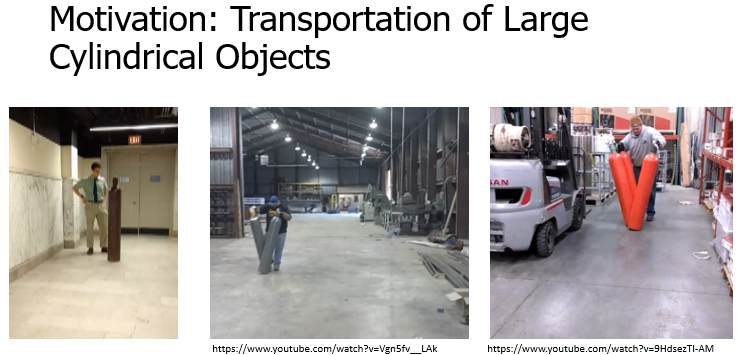
We present a novel robotic manipulation technique that we call robotic edge rolling. It refers to transporting a cylindrical object by rolling on its circular edge, as human workers might maneuver a gas cylinder on the ground.
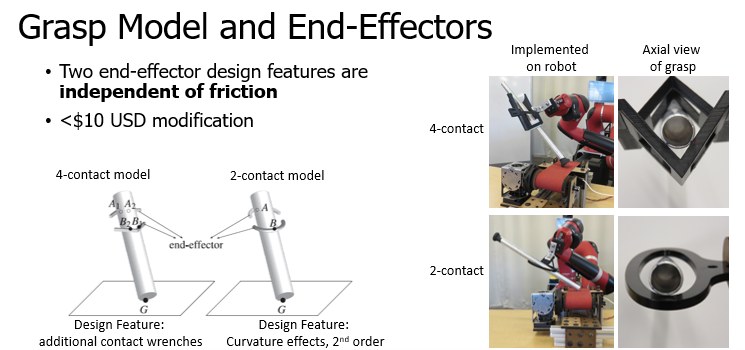
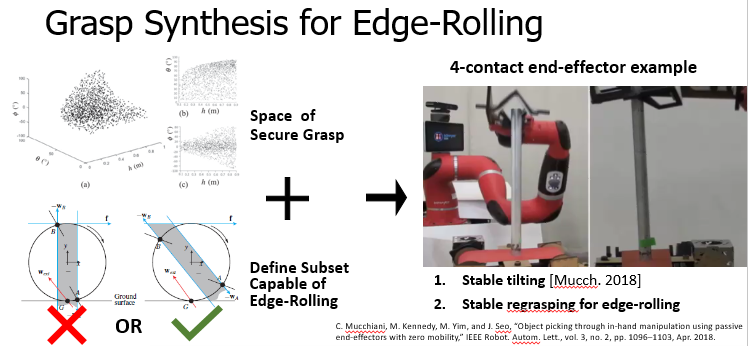
Our robotic edge rolling is achieved by controlling the object to both roll on its bottom edge in contact with the ground and slide on the surface of the robot’s end effector. It can thus be regarded as a form of robotic dexterous, in-hand manipulation with nonprehensile grasps. We address the problem of grasp planning for edge rolling by studying how to design appropriately shaped end effectors with zero internal mobility and how to find feasible grasps for stably rolling the object quasi-dynamically with our simple end effectors. An extensive set of experiments is performed with a conventional manipulator arm on not only flat surfaces but also a U-shaped half-pipe track. Long-range edge rolling is demonstrated with a modular mobile manipulator that is capable of active steering control.
Publications
-
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) A. Specian, C. Mucchiani, M. Yim, and J. Seo, “Robotic edge-rolling manipulation: a grasp planning approach,” Ieee robotics and automation letters, vol. 3, iss. 4, p. 3137–3144, 2018.
A. Specian, C. Mucchiani, M. Yim, and J. Seo, “Robotic edge-rolling manipulation: a grasp planning approach,” Ieee robotics and automation letters, vol. 3, iss. 4, p. 3137–3144, 2018.
[Bibtex]@article{AS:CM:MY:JS:18, title={Robotic Edge-Rolling Manipulation: A Grasp Planning Approach}, author={Specian, Andrew and Mucchiani, Caio and Yim, Mark and Seo, Jungwon}, journal={IEEE Robotics and Automation Letters}, volume={3}, number={4}, pages={3137--3144}, year={2018}, publisher={IEEE}, doi={10.1109/LRA.2018.2849828} }
Pingback:ลวดสลิง
Pingback:dultogel
Pingback:betnew99
Pingback:ล่องเรือเจ้าพระยา
Pingback:ใบพัดเครื่องจักรอุตสาหกรรม
Pingback:bangkok tattoo
Pingback:read
Pingback:dultogel promo
Pingback:https://shbet.tours
Pingback:dayz radar
Pingback:ส่งพัสดุ
Pingback:พอต ราคาส่ง
Pingback:virtual office for rent
Pingback:pgg369
Pingback:sci/sci news/news sci/ science diyala
Pingback:pgslot
Pingback:เช่าห้องเก็บของ
Pingback:Massage
Pingback:chat room
Pingback:ทดลองเล่นสล็อต pg
Pingback:fox888
Pingback:โคมโรงงาน
Pingback:Nonameauto
Pingback:Lsm99bet สล็อตเว็บตรง อันดับ 1
Pingback:สกรีนแก้ว
Pingback:kc9
Pingback:lotto888
Pingback:สีกันไฟ
Pingback:ufa789
Pingback:jili slot
Pingback:เว็บบาคาร่า ไม่มีขั้นต่ำ LSM99 เว็บยอดฮิตจ่ายตรงเชื่อถือได้