It is common in nature that goups of individuals can form a variety of structures in order to overcome the limited capability of each individual, especially for insects who often need to collaborate in large groups to finish tasks. This collective intelligence is important to modular robots which are composed of numerous simple building blocks, or modules. While each individual module usually has limited capability, multiple modules are able to execute complicated tasks by assembling into suitable configurations.
There are several challenges needed to be addressed for modular robot self-assembly:
- Efficiency is important, especially for modular robotic systems which are supposed to have a large number of modules involved;
- Many physical constraints have to be considered for real hardware applications;
- Accurate docking is required which is usually a hard problem for modular robots.
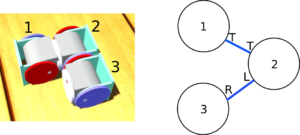
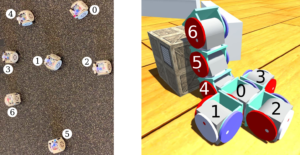
In this work, we present a framework to do self-assembly for SMORES-EP system. A modular robot topology configuration is fully defined as a graph. Given a team of modules on the ground and the goal topology configuration to assemble, each module is assigned to a role in the goal topology configuration in an optimal way by solving a task assignment problem. Then the corresponding assembly actions are computed which can be executed in a parallel manner. For example, A team of SMORES-EP modules are on the gound and the task is to reach the location on top of a box. These modules have to self-assemble themselves into a vehicle with an arm in order to reach high locations. We first compute the assignment for each module in the goal topology configuration in an optimal manner, and then a sequence of assembly actions are computed. All modules mapped to the target kinematic topology with the same depth can be executed in parallel for efficiency.
 1, 15, 22, 30, 46, 54 and 63.
1, 15, 22, 30, 46, 54 and 63.In order to ensure the success of assembly actions, a docking controller is presented. The docking process is divided into three steps: navigation, pose adjustment, and approach. Given a set of assembly actions, the collision-free paths to navigate all involved modules are generated by a multi-vehicle planner. A simple path-following controller is running for each involved module to go to its goal location. Then adjust the pose of each module align the docking connector. Lastly, command every involved module to approach its mating connector to finish docking. For some special cases, a helping module is needed to lift the involved module and deliver it to the location for docking. The performance of the controller is demonstrated using real hardware.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) C. Liu, Q. Lin, H. Kim, and M. Yim, “Parallel self-assembly with smores-ep, a modular robot,” in 2020 international conference on robotics and automation (icra), accepted, Paris, France, 2020.
C. Liu, Q. Lin, H. Kim, and M. Yim, “Parallel self-assembly with smores-ep, a modular robot,” in 2020 international conference on robotics and automation (icra), accepted, Paris, France, 2020.
[Bibtex]@INPROCEEDINGS{CL:QL:HK:MY:20, author={C. {Liu} and Q. {Lin} and H. {Kim} and M. {Yim}}, booktitle={2020 International Conference on Robotics and Automation (ICRA), accepted}, title={Parallel Self-Assembly with SMORES-EP, a Modular Robot}, year={2020}, pages={}, doi={}, ISSN={}, month={May}, address={Paris, France}, pdf={https://www.modlabupenn.org/wp-content/uploads/2022/03/liu_smores_assembly_2020.pdf} }
-
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) C. Liu, Q. Lin, H. Kim, and M. Yim, “SMORES-EP, a modular robot with parallel self-assembly,” Autonomous robots, 2022.
C. Liu, Q. Lin, H. Kim, and M. Yim, “SMORES-EP, a modular robot with parallel self-assembly,” Autonomous robots, 2022.
[Bibtex]@article{CL:QL:HK:MY:21, title = {{SMORES-EP}, a Modular Robot with Parallel Self-assembly}, author = {Liu, Chao and Lin, Qian and Kim, Hyun and Yim, Mark}, journal = {Autonomous Robots}, year = {2022}, doi = {10.1007/s10514-022-10078-1}, url = {https://doi.org/10.1007/s10514-022-10078-1}, issn = {1573-7527}, pdf = {https://arxiv.org/pdf/2104.00800.pdf} }
Pingback:ModLab UPenn » Archive » SMORES-EP
Pingback:SMORES-EP – ModLab – UPenn
Pingback:jazz playlist
Pingback:bossa nova for relax
Pingback:trap music mix
Pingback:calms the nervous system
Pingback:soothing piano
Pingback:france coffee
Pingback:ธุรกิจงานศพ
Pingback:พอต ราคาถูก
Pingback:betflix allstar
Pingback:Diyala/baqubah/university/universal
Pingback:รับจัดงานอีเว้นท์
Pingback:ทางเข้าpg
Pingback:สล็อตเกาหลี
Pingback:ลดข้าวดีด ข้าวเด้ง
Pingback:Wedding Planner in France
Pingback:ไก่ตัน
Pingback:AW8 Thai Login
Pingback:popular disposable vape brands
Pingback:Gifts
Pingback:สล็อตเว็บตรง แจ็คพ็อตแตกง่าย
Pingback:pg slot
Pingback:Diyala Science1
Pingback:joker369
Pingback:dark168
Pingback:kc9
Pingback:ดาวน์ไลท์
Pingback:แทงบอลออนไลน์เกาหลี
Pingback:เว็บตรงฝากถอนง่าย
Pingback:โอลี่แฟน
Pingback:kc9
Pingback:Diaphragm Husky
Pingback:ระบบสมาชิก
Pingback:โคมไฟ
Pingback:สล็อต888 เว็บตรง วอเลท