Flying modular robots have the potential to rapidly form temporary structures. In the literature, docking actions rely on external systems and indoor infrastructures for relative pose estimation. In contrast to related work, we provide local estimation during the self-assembly process to avoid dependency on external systems. In this paper, we introduce ModQuad-Vi, a flying modular robot that is aimed to operate in outdoor environments. We propose a new robot design and vision-based docking method. Our design is based on a quadrotor platform with onboard computation and visual perception. Our control method is able to accurately align modules for docking actions. Additionally, we present the dynamics and a geometric controller for the aerial modular system. Experiments validate the vision-based docking method with successful results.
Flying modules basically require two types of navigation systems: a global localization for navigating in the space and a relative localization for docking actions. The docking method in relies on a motion capture system to compute the relative localization. In order to reduce dependence on motion capture system and make the robots more suitable or outdoor missions, we propose a new robotic platform with: i) a GPS system for global navigation and ii) a vision-based system for docking actions. In this paper, we focus on the vision-based docking actions, noting that global localization still depends on the motion capture system for,testing purposes.
ModQuad-Vi Design
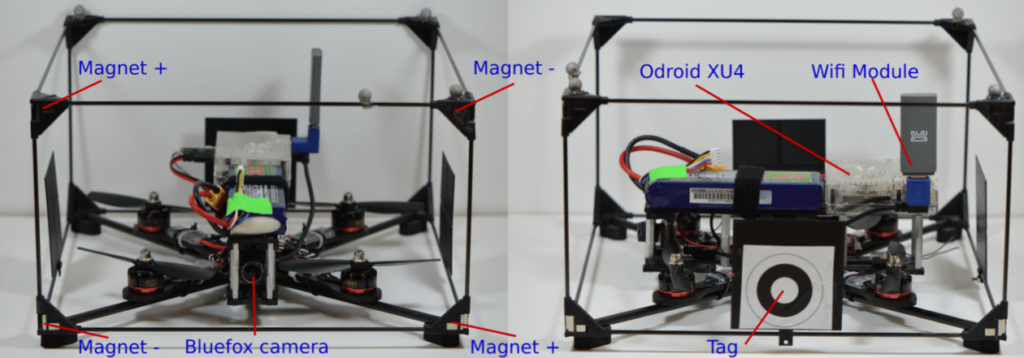
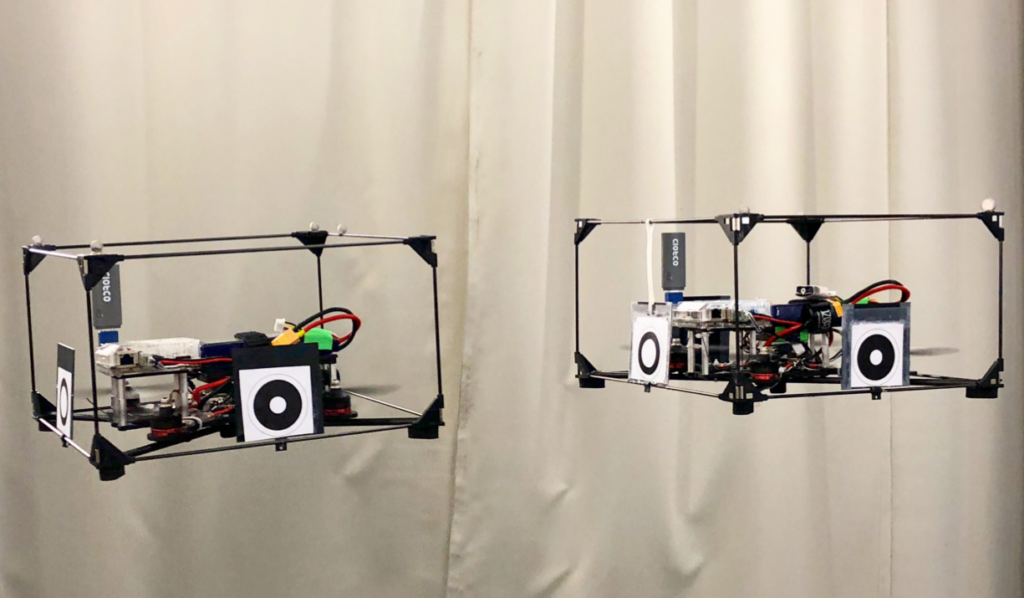
Our design is a cuboid frame, composed of 20 mm diameter carbon fiber tubes and 3-D printed ABS connectors. The dimension of the frame is 320 mm × 320 mm × 112 mm and the weight is 160 g. There are three vertical tags on three sides of the frame (left, right and back). The tags are used for relative position and velocity estimation during the docking process. The platform uses a custom quadrotor. Each rotor can
generate a maximum force of 1024 g, while the platform weighs 971 g. The mounted flight controller is the PIXFALCON autopilot with the open source PX4 autopilot firmware. The on-board computer communicates with a ground control station using a Wi-Fi module. The ROS platform [25] runs on the Odroid for controls and image processing. A Matrix Vision mvBlueFOX-MLC200wG camera with a wide angle lens is mounted on-board to transmit the captured images through USB 2.0 at 30 − 40 Hz. The camera provides monocular images with 752 × 480 resolution.
Conclusion
In conclusion, we present ModQuad-Vi, a team of vision- based flying modular robots that are able to self-assemble in midair. This work focuses on the estimation and visual servoing method for the docking procedure which struggles with the constraints of coupling air frame attitude and camera field of view. We first briefly introduce the dynamics and geometric control of the flying structure. We then develop
the estimation of the relative position and velocity between modules based on vision and IMU feedback. Finally we develop a visual servoing method to control the relative position and velocity of the robot with respect to one another. In the future, we plan to continue developing ModQuad-Vi to work in outdoor environments. Our proposed robot design includes the necessary elements to include additional sensors. For instance, integrating monocular VIO or GPS for the global position and yaw measurement. In addition, we want to study how the system scales.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) G. Li, B. Gabrich, D. Saldana, J. Das, V. Kumar, and M. Yim, “Modquad-vi: a vision-based self-assembling modular quadrotor,” in Ieee international conference on robotics and automation 2019, Montreal, Canada, 2019.
G. Li, B. Gabrich, D. Saldana, J. Das, V. Kumar, and M. Yim, “Modquad-vi: a vision-based self-assembling modular quadrotor,” in Ieee international conference on robotics and automation 2019, Montreal, Canada, 2019.
[Bibtex]@inproceedings{GL:BG:DS:JD:VK:MY:19, title = {ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor}, author = {Li, Guanrui and Gabrich, Bruno and Saldana, David and Das, Jnaneshwar and Kumar, Vijay and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation 2019}, address = {Montreal, Canada}, year = {2019}, pdf={https://www.modlabupenn.org/wp-content/uploads/2019/03/li_gabrich_saldana_modquadvi.pdf} }
Pingback:GRASP Labs coolest robot yet – Art Cyco
Pingback:Voici le robot le plus cool du GRASP à ce - Webtranex
Pingback:แทงบอล
Pingback:จำหน่ายอะไหล่อุตสาหกรรม
Pingback:ป้ายอัฐิ
Pingback:once human game hacks
Pingback:หวย อภิโชค
Pingback:โคมไฟ
Pingback:ufa191
Pingback:เล่นสล็อต Skywind ดียังไง
Pingback:789bet
Pingback:pgslot
Pingback:tga168
Pingback:เฟอร์นิเจอร์สไตล์มินิมอล
Pingback:ทดลองเล่นสล็อต pg ไม่เด้ง
Pingback:ของเล่นสนาม
Pingback:pirkt mežu
Pingback:สกรีนแก้ว
Pingback:WINBER
Pingback:789bet
Pingback:certified translation chiang mai
Pingback:รับผลิตสปริง
Pingback:the lord's prayer
Pingback:Wild Ape
Pingback:xo
Pingback:สั่งสินค้าจากจีน
Pingback:ปลูกผม
Pingback:book of ra slot
Pingback:เครื่องเป่าแอลกอฮอล์
Pingback:電子 菸
Pingback:รับจด อย
Pingback:เว็บปั้มไลค์
Pingback:pg168