We derive thrust, roll, and pitch authority from a single propeller and single motor through an underactuated mechanism embedded in the rotor itself. This allows new types of conventionally-capable micro air vehicles which only require two motors for practical control. This contrasts with the many servos and linkages of conventional helicopters or the many drive motors found in quadrotors.
Conventional UAV formats applied to smaller and smaller micro air vehicles lead to significant design challenges. A swashplate-controlled coaxial helicopter must find room in its mass, size, and cost budget for four actuators (two big rotor motors, two swashplate servo motors) and a complex linkage assembly. A quadrotor must similarly support four motors and face the practical problems of rapidly shrinking rotors. Our new rotor system provides significant system simplifications while retaining all the advantages of cyclic control.
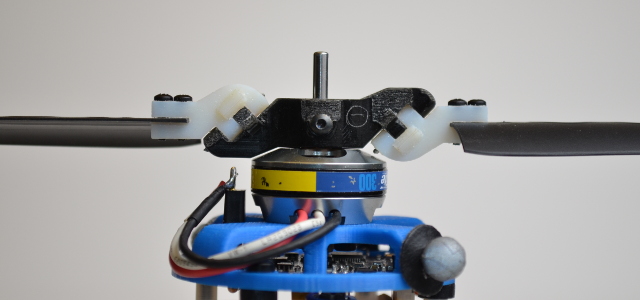
The main motor directly drives the propeller hub, which is itself connected to the propeller blades by two inclined hinges. The hinge geometry couples blade lead-and-lag oscillations to a change in blade pitch. Instead of only driving the motor with a steady torque, we add a sinusoidal component in phase with the rotation of the rotor to induce a cyclic pitch variation. The amplitude and phase of this control signal determines the magnitude and direction of the vehicle response.
By using two of these propellers we can make the aircraft “fully actuated.” It can accelerate and maneuver without pitching and rolling; or pitch and roll while staying stationary.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) J. Paulos, B. Caraher, and M. Yim, “Emulating a fully actuated aerial vehicle using two actuators,” in 2018 ieee international conference on robotics and automation, Brisbane, Australia, 2018.
J. Paulos, B. Caraher, and M. Yim, “Emulating a fully actuated aerial vehicle using two actuators,” in 2018 ieee international conference on robotics and automation, Brisbane, Australia, 2018.
[Bibtex]@inproceedings{JP:BC:MY:18, title = {Emulating a Fully Actuated Aerial Vehicle using Two Actuators}, author={Paulos, James and Caraher, Bennet and Yim, Mark}, booktitle = {2018 IEEE International Conference on Robotics and Automation}, address = {Brisbane, Australia}, year = {2018}, doi={10.1109/ICRA.2018.8462975}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/05/paulos_emulating_ICRA_2018.pdf} }
- J. Paulos and M. Yim, “Cyclic blade pitch control without a swashplate for small helicopters,” Journal of guidance, control, and dynamics, vol. 41, iss. 3, p. 689–700, 2018.
[Bibtex]@article{JP:MY:18, title={Cyclic Blade Pitch Control Without a Swashplate for Small Helicopters}, author={Paulos, James and Yim, Mark}, journal={Journal of Guidance, Control, and Dynamics}, volume={41}, number={3}, pages={689--700}, year={2018}, publisher={American Institute of Aeronautics and Astronautics}, doi={10.2514/1.G002683}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/05/paulos_cyclic_blade_pitch_JGCD_2018.pdf} }
- J. Paulos and M. Yim, “Flight performance of a swashplateless micro air vehicle,” in Robotics and automation (icra), 2015 ieee international conference on, 2015, pp. 5284-5289.
[Bibtex]@INPROCEEDINGS{JP:MY:15, author={Paulos, James and Yim, Mark}, booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on}, title={Flight Performance of a Swashplateless Micro Air Vehicle}, year={2015}, month={May}, pages={5284-5289}, keywords={Attitude control;Blades;Brushless motors;Helicopters;Propellers;Rotors;Vehicles}, doi={10.1109/ICRA.2015.7139936}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_flight_performance_ICRA_2015.pdf} }
- J. Paulos and M. Yim, “An underactuated propeller for attitude control in micro air vehicles,” in Intelligent robots and systems (iros), 2013 ieee/rsj international conference on, Tokyo, Japan, 2013.
[Bibtex]@INPROCEEDINGS{JP:MY:13, author={Paulos, James and Yim, Mark}, booktitle={Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on}, title={An Underactuated Propeller for Attitude Control in Micro Air Vehicles}, year={2013}, address={Tokyo, Japan}, month={November}, doi={10.1109/IROS.2013.6696528}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_an_underactuated_propeller_IROS_2013.pdf}, }