Overview
Normally, when robots are designed there is a specific task in mind. Once that task is specified, the designer can choose an appropriate robot shape for performing the task well. Yet for many robotic missions this approach is insufficient. There is a class of missions that by their very nature are Unknown Challenge Missions. In these missions, we must commit robot hardware to the task before knowing exactly what it is that these robots must do. Examples include disaster recovery and other first response tasks, intelligence gathering missions, troop support missions against an adapting adversary, and planetary exploration.
One of the key claims of modular robotics is to allow robots to be quickly adapted to unanticipated task requirements after being deployed to the field. Modular robots aim to address this requirement by having many modules from a small set of
module types, that can be rearranged into a robot morphology to accomplish the desired task. Observing that such systems often assume that the robot body will be constructed of modules, which are generally heavy and expensive we suggest a less costly and more mechanically efficient alternative: constructing robot body part from self-hardening foam.
Foam synthesis
 |
Foam synthesis uses our synthesiser cart, which is based on an off-the-shelf insulation foam, and a simple valve constructed from a spring-clamp. These are mounted on a moving platform constructed for the Mini-PR2 robot, which allows holonomic motion in the plane. Finally, an additional actuator allow the operator to control the elevation of the foam-spraying nozzle. A laser pointer is mounted to the nozzle to simplify aiming the foam spray.
Robot parts
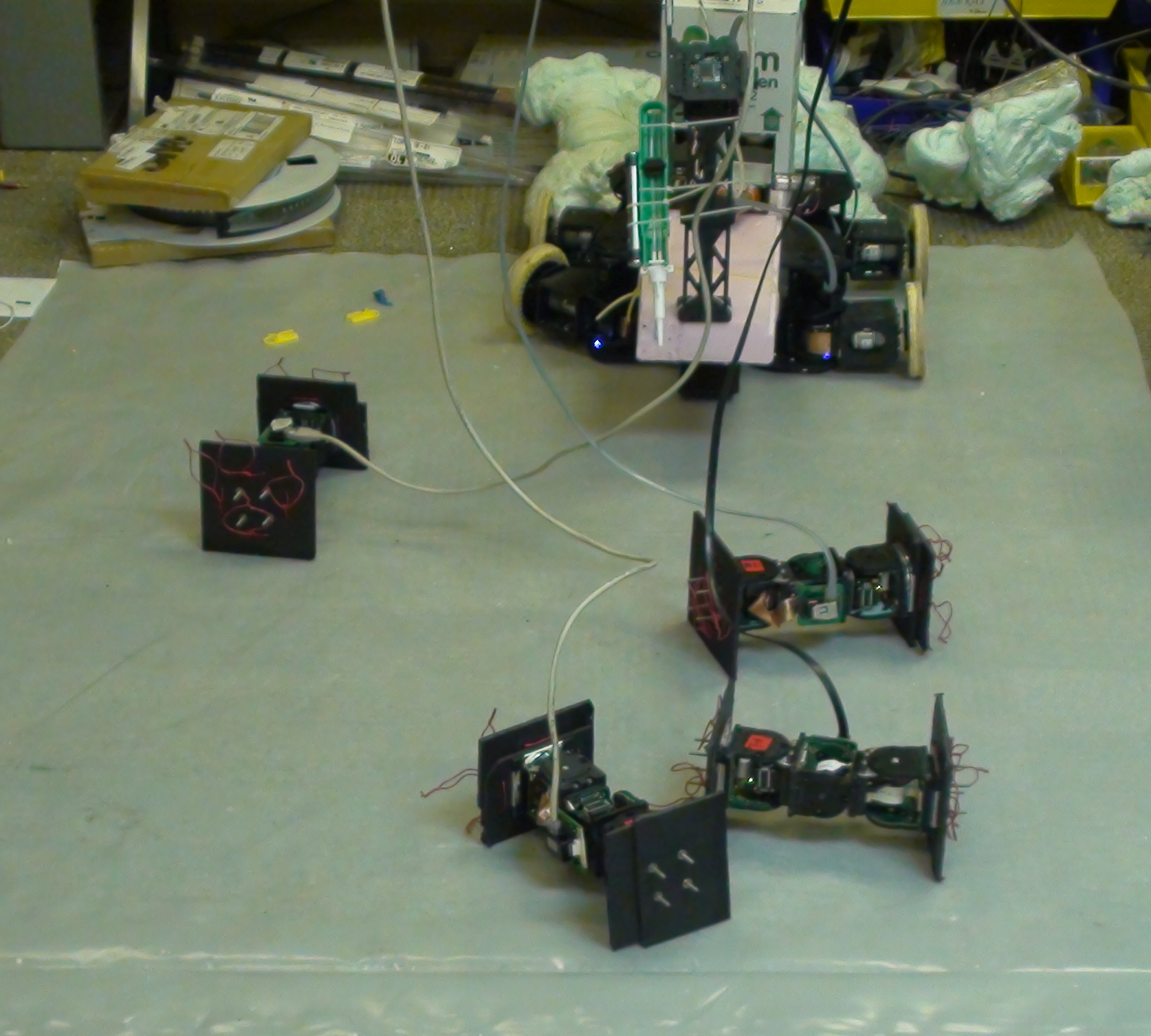 |
The actuators and microcontrollers that make up the robot are pre-assembled in clusters of three CKBots each. These minimally mobile clusters have a magnetic attachment face on their ends, to which we attached interface plates made of foam-core with 5cm bolts pointing out of the surface. The two face-plates also hold down a splash-protector nylon sheet which protects the actuators from foam splatter. The bolts get embedded in the foam synthesised body parts.
Tasks
We accomplished four tasks with the foam synthesis system
Building robots
We built and operated two different robot morphologies starting from the same initial cart and cluster configuration.
Hazard disposal
We used a simple motorised wheel and passive skids to form a low-cost wheeled robot that can carry a bio-/sharps- hazard away by encapsulating it in foam. Picking up broken glass and needles with a robot arm would not have been feasible.
Doorstop
Foam can be used to change the environment. For example, in fire-fighting or hostage rescue situations it is critically important to control entrances and exits of a building. The robot can easily jam doors and windows in the closed or open state by deploying foam.
References
-
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) S. Revzen, M. Bhoite, A. Macasieb, and M. Yim, “Structure synthesis on-the-fly in a modular robot,” in Intelligent robots and systems (iros), 2011 ieee/rsj international conference on, 2011, pp. 4797-4802.
S. Revzen, M. Bhoite, A. Macasieb, and M. Yim, “Structure synthesis on-the-fly in a modular robot,” in Intelligent robots and systems (iros), 2011 ieee/rsj international conference on, 2011, pp. 4797-4802.
[Bibtex]@INPROCEEDINGS{SR:MR:AM:MY:11, author={Revzen, S. and Bhoite, M. and Macasieb, A. and Yim, M.}, booktitle={Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on}, title={Structure synthesis on-the-fly in a modular robot}, year={2011}, month={sept.}, volume={}, number={}, pages={4797 -4802}, keywords={CKBot modules;foam generation device;foam structures;legged robot;mobile modular robot system;mobile platform;robot morphologies;snake-like robot;structural elements;structure synthesis on-the-fly;foams;legged locomotion;}, doi={10.1109/IROS.2011.6094575}, ISSN={2153-0858}, }
Preprint of IROS 2011 paper
Press kit with high-resolution photos [.zip, 16MB]
Pingback:Watch a Robot Build Other Robots out of Spray Foam [Video] | wpgrabber
Pingback:Robot sprays bodies for itself using foam | Donald Schwartz
Pingback:Watch A Robot Build Other Robots Out Of Spray Foam | Gizmodo Australia
Pingback:Un robot crée son propre corps avec une mousse durcissante… - Shy Robotics - Shy Robotics
Pingback:Robot puede construir otros robots, el principio del Apocalipsis robótico
Pingback:Watch a Robot Build Other Robots out of Spray Foam | My Blog
Pingback:Roboter können andere Roboter aus Schaum bauen - GIZMODO DE - Das Gadget-Weblog
Pingback:Un robot capable d’en construire un autre | Synchro Blogue | Sympatico
Pingback:MODLAB : des robots modulaires qui fabriquent des robots | INNOVATIONS de l'ÉTS et D'AILLEURS
Pingback:Robot fabrica otros robots con espuma
Pingback:Robot creates other robots out of foam | Tech Dott - Daily Technology News Magazine
Pingback:Robot fabrica otros robots con espuma | Noticias - d2.com.es
Pingback:Regardez ce robot construire un autre robot « Clubic
Pingback:Researchers design robot that creates new robots out of foam
Pingback:Researchers design robot that creates new robots out of foam | RichWood.cz - Interiér - Exteriér - Design - Architektura - Vizualizace
Pingback:Researchers design robot that creates new robots out of foam » imaypop.com
Pingback:Researchers design robot that creates new robots out of foam | Transition Strategy
Pingback:Robot creates other robots out of foam « Shanepliskin's Blog
Pingback:Researchers design robot that creates new robots out of foam
Pingback:Science Sunday #19 « Radio Freethinker
Pingback:FOAMBOT BUILDS BABY BOTS FOR ANY OCCASION » CKBOTS, FOAMBOT, REVZEN, MODLAB, CKBOT, TECHNEWSWORLD » TECHNO TODAYS
Pingback:The robots are now building other robots
Pingback:FoamBot Builds Baby Bots for Any Occasion : iTechfeed.com
Pingback:FOAMBOT BUILDS BABY BOTS FOR ANY OCCASION » CKBOTS, FOAMBOT, REVZEN, TECHNEWSWORLD, CKBOT, ABOUT » TECHNOLOGY NEWSPAPER
Pingback:FoamBot Builds Baby Bots for Any Occasion - Technology and Gadgets Tracker 2.0 | Technology and Gadgets Tracker 2.0
Pingback:Roboter baut Roboter - BotRoom.com - Haushaltsroboter und mehr
Pingback:Schuimrobot geeft eigen lichaam vorm - KIJK.nl
Pingback:Robot creates other robots out of foam | My Blog