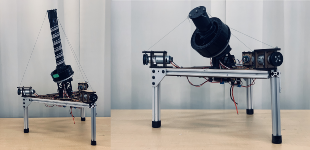
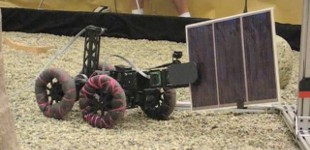
CHUTnI: Compensated Holonomic Uneven Terrain Isolator
We present CHUTNI (Compensated Holonomic Uneven Terrain Isolator), an off-road differential-drive with offset turret platform that delivers holonomic control of a stabilized turret on uneven terrain. CHUTNI uses simple drive wheels on a rocker suspension to keep both wheels in contact with the ground, while an actively stabilized gimbal with three degrees of freedom, i.e., …
Read more "CHUTnI: Compensated Holonomic Uneven Terrain Isolator"
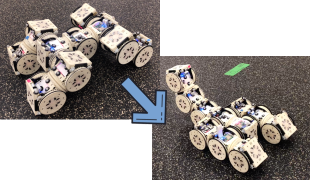
Multistability Enabled Passive Multiplexing in an n-DOF, Underactuated Hyper-Redundant Robot
New developments in robotics have allowed robots to become very small, and capable of completing tasks humans cannot. Current robots capable of achieving this are physically limited in how small they can be without compromising on other aspects such as sensing, strength, or complexity. Thus, we strive to understand how we can more compactly map …
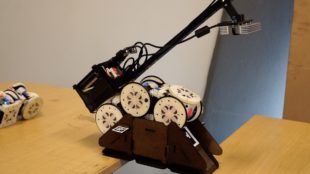
Design and Kinematics of CHAMPS: a Configurable, Highly-Articulated, Multi-Purpose Snake
CHAMPS is a configurable, highly articulated modular manipulator driven by a single actuator with selective joint engagement. The design combines shared actuation, embedded locking, and alternating joint geometry to enable scalable hyper-redundant motion.
Steerable Tape-Spring Needle for Autonomous Sharp Turns Through Tissue
Steerable needles offer a minimally invasive method to deliver treatment to hard-to-reach tissue regions. We introduce a new class of tape-spring steerable needles capable of sharp turns ranging from 15 to 150 degrees with a turn radius as low as 3mm, which minimizes surrounding tissue damage. In this work, we derive and experimentally validate a …
Read more "Steerable Tape-Spring Needle for Autonomous Sharp Turns Through Tissue"
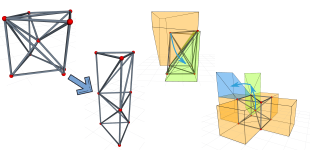
Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion
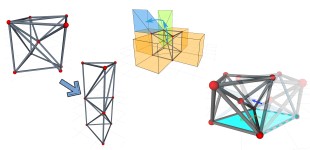
Truss robots are highly redundant parallel robotic systems that can be applied in a variety of scenarios. The variable topology truss (VTT) is a class of modular truss robots. As self-reconfigurable modular robots, a VTT is composed of many edge modules that can be rearranged into various structures depending on the task. These robots change …
Read more "Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion"
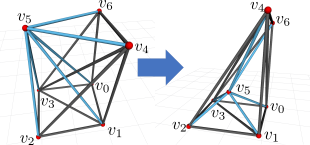
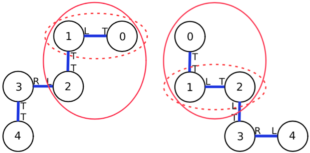
A Linking Invariant for Truss Robot Motion Planning
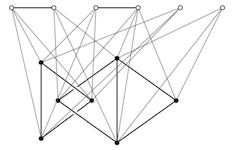
We introduce a new invariant for truss robot motion planning, called the link-augmented graph. This gives you a way to quickly tell if the start and goal configurations of a motion planning query might have a collision-free path between them.
Polygon-based Random Tree Search Algorithm for a Size-Changing Robot
Fig. 1. Summary figure of the study: (a) The octahedron shape VTT; (b) Path planning through the narrow passage; (c) Locomotion simulation through the narrow passage. We proposed the Polygon-based Random Tree (PRT) search algorithm for path planning of the Variable Topology Truss (VTT) system [1]. PRT search algorithm finds the path to the goal …
Read more "Polygon-based Random Tree Search Algorithm for a Size-Changing Robot"
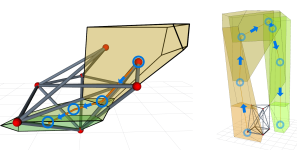
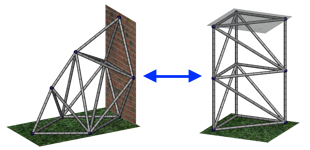
Reconfiguration Solution of a Variable Topology Truss: Design and Experiment
Fig. 1. Conceptual images of the VTT performing a search and rescue mission on a disaster site. (a) Locomotion; (b) arriving at the destination; (c) the master node grasping the target truss; (d) moving of the target truss; (e) finishing reconfiguration; (f) shoring up. VTT comprises “members,” and “nodes.” Nodes are located at the …
Read more "Reconfiguration Solution of a Variable Topology Truss: Design and Experiment"
Topological Reconfiguration Planning for a Variable Topology Truss

Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This article covers the contributions of our journal article about …
Read more "Topological Reconfiguration Planning for a Variable Topology Truss"
Polygon-based Random Tree Search Planning for Variable Geometry Truss Robot
Variable Topology Truss (VTT) is an improved Variable Geometry Truss that can change its topology. We designed the VTT as an octahedron shape by considering topology reconfiguration. The most important task of VTT is locomotion to a random goal position. Previously we used Rapid Random Tree (RRT) to find a trajectory of the center of …
Read more "Polygon-based Random Tree Search Planning for Variable Geometry Truss Robot"
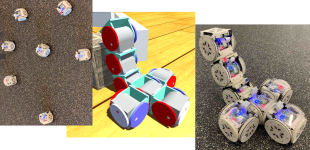
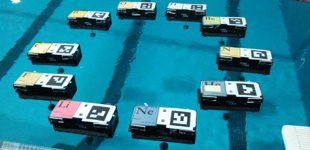
Modboat: A Single-Motor Modular Self-Reconfigurable Robot

The Modboat is an inexpensive, oscillating surface-swimming robot powered by a single-motor and built from the ground up for low-cost modular self-reconfiguration. Very little work has been done on surface-swimming modular self-reconfigurable robotic systems (MSRRs), and to date it has heavily relied on holonomic modules. The Modboat aims to challenge that paradigm and develop aquatic …
Read more "Modboat: A Single-Motor Modular Self-Reconfigurable Robot"
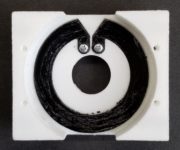
IceBot: A Robot Made from Ice
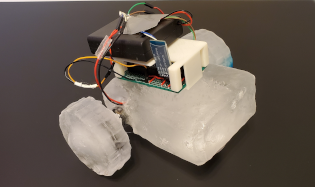
IceBot is the first robot made from ice, as confirmed by the Guinness World Records team. We intend for the robot to operate in harsh, remote, sub-zero environments like Antarctica and even further away, Saturn’s moon Enceladus for example. As the structural components of the robot are made from ice, when operating in these environments …
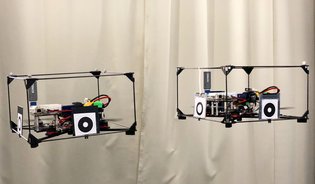
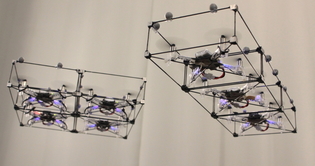
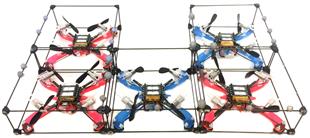
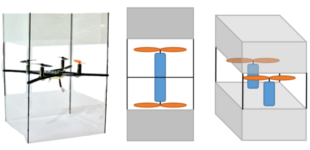
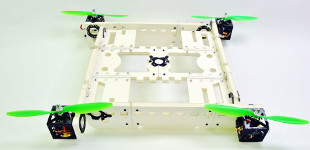
Finding Structure Configurations for Flying Modular Robots
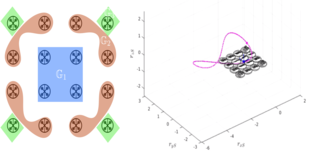
Flying Modular Structures offer a versatile mechanism that can change the arrangement of constituent actuators according to task requirements. In this work, we extend a modular aerial platform that can expand its actuation capabilities depending on the configuration. Each module is composed of a quadrotor in a cage that can rigidly connect with other modules. …
Read more "Finding Structure Configurations for Flying Modular Robots"
A Quadratic Programming Approach to Manipulation in Real Time

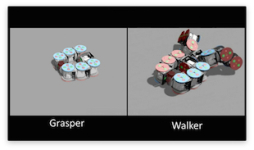
Manipulation tasks usually involve the control of redundant robots to reach large workspaces while avoiding obstacles and satisfying other constraints. This results in motion planning in high-dimensional space. In addition, whole-body manipulation tasks using multi-limbed robots may need the control of more than one manipulators. Modular robots can be used to construct many useful morphologies …
Read more "A Quadratic Programming Approach to Manipulation in Real Time"
Motion Planning for Variable Topology Truss Modular Robot
Featured on Wevolver.com! Variable topology truss (VTT) is a self-reconfigurable modular truss robot. Similar to other types of truss robots, a VTT is composed of multiple members or edge modules which are the beam elements in the truss and nodes that are the connections among members, and can achieve high structural efficiency, change its shape …
Read more "Motion Planning for Variable Topology Truss Modular Robot"
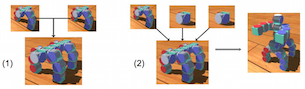
Parallel Self-assembly with SMORES-EP
It is common in nature that goups of individuals can form a variety of structures in order to overcome the limited capability of each individual, especially for insects who often need to collaborate in large groups to finish tasks. This collective intelligence is important to modular robots which are composed of numerous simple building blocks, …
A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots
Variable topology truss (VTT) is a modular robotic system which is composed of multiple edge modules including a linear actuator as the truss member plus the two ends of the member that attach or detach from other ends to form the node. A VTT usually has at least 18 actuated degrees-of-freedom (DOFs) and typically more …
Read more "A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots"
ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors

In nature it is very common for insects to work together in collaboration to achieve formation of structures such as bridges, platforms and other configurations. There is no centralized command that determines each individual’s motions, forces and connections, once each one of them determines its own behavior locally. A flying modular platform called ModQuad was …
Read more "ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors"
Spiral Zipper Manipulator for Aerial Grasping and Manipulation
We present a novel manipulator for aerial vehicles to perform grasping and manipulation tasks. The goal is to design a low-cost, relatively light but strong manipulator with a large workspace and compact storage space that can be mounted on an unmanned aerial system. A novel design solution based on the Spiral Zipper, an expanding tube, …
Read more "Spiral Zipper Manipulator for Aerial Grasping and Manipulation"
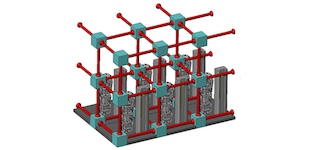
Variable Topology Truss
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This page is the overall page for all VTT-related research. …
Reconfiguration Motion Planning for Variable Topology Truss
Finalist for Best Paper Award on Safety, Security, and Rescue Robotics in Memory of Motohiro Kisoi at IROS 2019 This work presents an algorithm to do motion planning for a new class of self-reconfigurable modular robot: the variable topology truss (VTT). Modular robots consist of many modules that can be configured into various structures, and …
Read more "Reconfiguration Motion Planning for Variable Topology Truss"
A Distributed Reconfiguration Planning for Modular Robots
Self-reconfigurable modular robots are usually composed of multiple modules with uniform docking interfaces that can be transformed into different configurations by themselves. The reconfiguration planning problem is finding what sequence of reconfiguration actions are required for one arrangement of modules to transform into another. We present a novel reconfiguration planning algorithm for modular robots. The …
Read more "A Distributed Reconfiguration Planning for Modular Robots"
ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor
Flying modular robots have the potential to rapidly form temporary structures. In the literature, docking actions rely on external systems and indoor infrastructures for relative pose estimation. In contrast to related work, we provide local estimation during the self-assembly process to avoid dependency on external systems. In this paper, we introduce ModQuad-Vi, a flying …
Read more "ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor"
High-Dimensional Area of Acceptance Using Discrete Methods
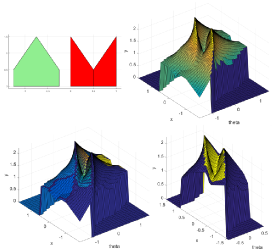
Physical connectors with self-aligning geometry aid in the docking process for many robotic and automatic control systems such as robotic self-reconfiguration and air-to-air refueling. This self-aligning geometry provides a wider range of acceptable error tolerance in relative pose between the two rigid objects, increasing successful docking chances. A new, more discrete flooding method for analyzing …
Read more "High-Dimensional Area of Acceptance Using Discrete Methods"
Autonomous Modular Robots

The theoretical ability of modular robots to reconfigure in response to complex tasks in a priori unknown environments has frequently been cited as an advantage and remains a major motivator for work in the field. We present a modular robot system capable of autonomously completing high-level tasks by reactively reconfiguring to meet the needs of …
Environment Augmentation with Modular Robots
We present a system enabling a modular robot to autonomously build structures in order to accomplish high-level tasks. Building structures allows the robot to surmount large obstacles, expanding the set of tasks it can perform. This addresses a common weakness of modular robot systems, which often struggle to traverse large obstacles. This paper presents the …
Robotic Edge-Rolling Manipulation: A Grasp Planning Approach

We present a novel robotic manipulation technique that we call robotic edge rolling. It refers to transporting a cylindrical object by rolling on its circular edge, as human workers might maneuver a gas cylinder on the ground.
A Flying Gripper Based on Cuboid Modular Robots

Grasping objects is a hard task that usually implies a dedicated mechanism (e.g arm, gripper) to the robot. Instead of adding extra components, have you thought about embedding the grasping capability to the robot itself? Have you also thought about whether we could do it flying? In the GRASP Laboratory at the University of Pennsylvania, …
ModQuad: The Flying Structure that Self-Assembles in Midair
Modular robots can adapt and offer solutions in emergency scenarios, but self-assembling on the ground is a slow process. What about self-assembling in midair? In one of our recent work in GRASP Laboratory at University of Pennsylvania, we introduce ModQuad, a novel flying modular robotic structure that is able to self-assemble in midair and cooperatively …
Read more "ModQuad: The Flying Structure that Self-Assembles in Midair"
Object Picking through In-Hand Manipulation using Passive End-Effectors with Zero Mobility

We present a new method for picking objects through quasistatic in-hand manipulation with endeffectors that have no degrees of freedom. Our stable manipulation/ grasp planning is achieved with two contacts at fixed distance and the force of gravity, and is provably complete and correct. Practically, our robotic in-hand manipulation technique can facilitate low-cost manipulation and …
Quori: A Community-Driven Modular Research Platform for Sociable Human-Robot Interaction
Quori is a novel, affordable, socially interactive robot platform for enabling non-contact human-robot interaction (HRI) research in both in-lab and “in the wild” experimental settings. The package will be complete with an expressive projected face, two gesturing arms, bowing spine, and an omnidirectional base. Software is provided at the low-level to control the hardware and at the high-level, provided by Semio, to easily generate versatile social behaviors.
Configuration Recognition with Distributed Information for Modular Robots
Modular robots are usually composed of multiple blocks with uniform docking interfaces that can be transformed into different configurations. It is a significant challenge to recognize modular robot configurations composed of hundreds of modules. Given a new configuration, it is important to match it to an existing configuration and, if true, map each module to …
Read more "Configuration Recognition with Distributed Information for Modular Robots"
Tether-Tube Robots
Tether-Tube Robot are a new type of parallel robots constructed from tethers and tubes. It is similar to cable robots but, rather than just using cables, expanding tubes are also used to do actuation. This design is achieved by utilizing a novel prismatic joint called Spiral Zipper developed in ModLab.
Spiral Zipper

Spiral Zipper is a novel linear actuator developed in Modlab. The fundamental concept is that a long thin strip of material is generally flexible along its length but stiff along its height. If we pattern the upper and lower edges of the strip , winding this strip in a spiral will create a rigid load-carrying …
PaintPots
The PaintPot manufacturing process is a new way to create low-cost, low-profile, highly customizable potentiometers for position sensing in robotic applications. It uses widely accessible materials, requires no special expertise, and creates custom potentiometers in a variety of shapes and sizes, including curved surfaces.
Variable Topology Truss: Concept, Design and Analysis
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes.
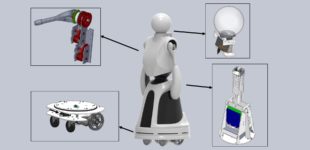
Evaluating Older Adults’ Interaction with a Mobile Assistive Robot

We present findings from two deployments of an autonomous mobile robot in older adult low income Supportive Apartment Living (SAL) facilities. Design guidelines for the robot hardware and software were based on query of clinicians, caregivers and older adults through focus groups, member checks and surveys, to identify what each group believed to be the …
Read more "Evaluating Older Adults’ Interaction with a Mobile Assistive Robot"
A Decentralized Algorithm for Self Assembling Structures with Modular Robots
Recent work in the field of bio-inspired robotic systems has introduced designs for modular robots that are able to assemble into structures (e.g., bridges, landing platforms, fences) using their bodies as the building components. Yet, it remains an open question as to how to program large swarms of robotic modules so that the assembly task …
Read more "A Decentralized Algorithm for Self Assembling Structures with Modular Robots"
Modular Robot Connector Acceptance by Configuration Space Analysis

Attachment and detachment between modules is critical for modular robot reconfiguration, and is a key design area for these systems. By re-purposing the interpretation of a well-known motion planning tool in configuration space obstacles for its encoding of contact geometry, we have developed a method for determining a metric of the region of error tolerance …
Read more "Modular Robot Connector Acceptance by Configuration Space Analysis"
Piccolissimo
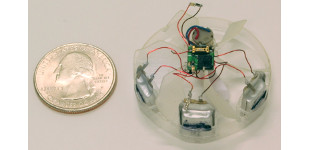
Piccolissimo is the smallest self-powered flying vehicle (to the best of our knowledge). Thanks to its passive stability, it can fly with only one actuator. This makes it simple and low cost to construct and less likely to have a component fail.
The EP-Face Connector
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high- strength (88.4N), compact, fast, power efficient, and robust to position errors.
An End-to-End System for Accomplishing Tasks with Modular Robots
Best Systems Paper, RSS 2016. In this paper, we present an end-to-end system for addressing tasks with modular robots, and demonstrate that it is capable of accomplishing challenging multi-part tasks in hardware experiments.
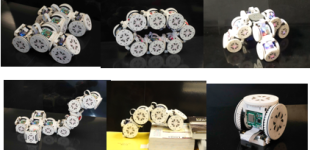
SMORES-EP

SMORES-EP is a modular robot designed and built at the University of Pennsylvania, and used by researchers at Penn and Cornell. SMORES stands for Self-Assembling MOdular Robot for Extreme Shapeshifting, and EP refers to the Electro-Permanent magnets the modules use to connect.
Computer-Aided Compositional Design and Verification for Modular Robots
To take full advantage of the flexibility of a modular robot system, users must be able to create and verify new configurations and behaviors quickly. We have developed a design framework that facilitates rapid creation of new configurations and behaviors through composition of existing ones, and tools to verify configurations and behaviors as they are …
Read more "Computer-Aided Compositional Design and Verification for Modular Robots"
American Helicopter Society Student MAV Challenge 2015

We have developed a low-cost, lightweight coaxial-rotor MAV capable of full attitude control using just two actuators. The vehicle provides real-time telemetry and high-quality video to a ground station which can be used to remotely pilot the vehicle. The design integrates the underactuated rotor system developed in the lab with parts of cheap helicopter toys …
Read more "American Helicopter Society Student MAV Challenge 2015"
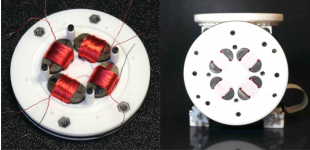
Passive Stability of MAVs Without Angular Momentum
We modeled and built Micro Aerial Vehicles (MAVs) that naturally hover without any sensing or control. These types of vehicles, called passively stabilized vehicles, can be made less complicated, more robust, and at lower cost with the addition of simple, yet carefully designed, stabilizer sails.
Modular Robot Design Embedding
We have developed an algorithm that automatically detects embeddability of modular robot configurations. Simply put, a given design embeds another design if it can replicate its structure, and therefore simulate its functionality. We introduce a novel graph representation for modular robots, and formalize the notion of embedding through topological and kinematic conditions. Our algorithm involves …
Underactuated Rotor for Simple Micro Air Vehicles
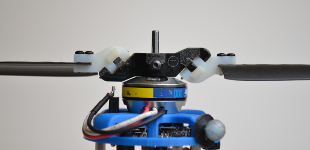
We extract thrust, roll, and pitch authority from a single propeller and single motor through an underactuated mechanism embedded in the rotor itself. This allows new types of conventionally-capable micro air vehicles now requiring only two motors. This contrasts with the servos and linkages of conventional helicopters or the four drive motors in quadrotors.
Low-cost Laser Range Finder

The goal for this project is to make a low-cost but high-speed , very small and reliable laser range finder. The idea is to talk to a small camera, and obtain the laser line position and send out the data line by line in real-time.
Anticogging
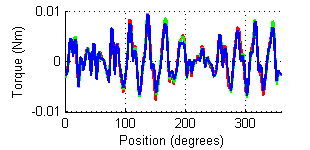
Smooth motion is critical to robotic applications like haptics or those requiring high precision force control. These systems are often direct-drive, so any torque ripple in the motor output must be minimal. Unfortunately, low inherent torque ripple motors are expensive. We came up with a method to map and suppress torque ripple from cogging torque so low cost motors can perform as well as expensive ones, while using only a position sensor, which is already required for servo control. We call this compensation "Anticogging".
Passive Stability of a Single Actuator MAV

In an effort to build one of the world's smallest flying vehicles, we built a flying vehicle with only two moving parts connected by one motor. Because the vehicle cannot control its attitude with its one actuator, passive stability is a required trait, so we derived design requirements for making passively stable vehicles.
Persona
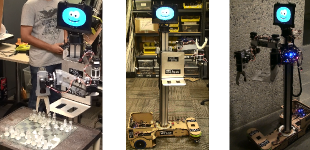
Our mobile telepresence robot is fitted with a robotic manipulator that will allow a person to virtually manipulate the avatar environment. We have shown our robot called "Persona" to be capable of moving up and down ramps, use elevators, manipulate objects such as chess pieces, and to lift and transport loads up to 4.5 kg.
DARPA DRC Trials

The DARPA Robotics Challenge (DRC) is a competition sponsored by DARPA to encourage rapid, innovative development in the field of humanoid robotics. Modlab participated with Penn as a part of Team THOR and Dr. Lee's lab, in an alliance with Virginia Tech, Robotis Inc, and Harris Corp. The Trials were held from Dec 20-21, 2013, with sixteen teams each providing a robot to complete eight tasks designed to simulate disaster recovery scenarios.
Little Robots to move Big Things

The Little Robots to move Big Things project is motivated by the paradigm in modern robotics that most robots are incapable of manipulating objects that are even a small proportion of the robot's mass. This project seeks to overturn this trend by using small robots to create large forces by leveraging the reaction forces created through interactions with fixed objects in the workspace.
SEAL Pack
The SEAL Pack is versatile, portable, and quickly deployable, similar to the Navy SEALs. SEAL stands for SEa, Air, and Land and the SEAL Pack is versatile enough to traverse all three. The SEAL Pack is transported in a compact way, and can be unpacked into either a car, boat, or quadrotor in a matter of minutes thanks to its modular design.
BalletBot

The Modular Robotics Laboratory (Dean Wilhelmi, Stella Latscha, Matthew Piccoli) collaborated with other technology studios from Penn (IKStudio under Simon Kim) and Harvard, as well as dance studio Carbon Dance Theatre (co-choreographers: Meredith Rainey & Marcel W. Foster) to create a dance performance blending art and technology called Science Per Forms.
Hybrid Exploration Robot for Air and Land Deployment (H.E.R.A.L.D)

A team of five mechanical engineering seniors, in collaboration with the Modular Robotics Laboratory and under the guidance of Dr. Mark Yim, have designed a search and rescue research platform intended to address limitations of current search and rescue robots and introduce a novel form factor and integration technique into the field.
Tactically Expandable Maritime Platform (T.E.M.P.)
We have built a system of shipping container sized robotic boats that can hook onto each other. We demonstrate the conceptual design of a system that is capable of constructing bridges and various shaped islands that can be made compliant to waves.
X-Face
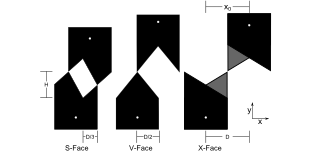
Docking and undocking are common activities for robots (modular robots in particular). The relative frequency of this operation behooves us to ensure reliable alignment under uncertain conditions. We present a new face geometry that is numerically superior to existing alignment geometries. This geometry is intended for two-dimensional reconfigurable robots.
ModLock

Connection mechanisms are critical to modular reconfigurable systems. The ModLock manual connection system is both fast to attach/detach and strong. This low cost, low profile connection system has been demonstrated on a variety of robot configurations including legged walkers, flying quadrotors and wheeled robots.
SMORES

The design of this system called SMORES (Self-assembling MOdular Robot for Extreme Shapeshifting) is capable of rearranging its modules in all three classes of reconfiguration; lattice style, chain style and mobile reconfiguration. Modules are independently mobile and are capable of self-assembly from a collection of disconnected modules.
ICRA Robotic Planetary Contingency 2008
ICRA Robotic Planetary Contingency 2008 featured four teams competing in multiple, time sensitive, emergency scenarios with modular robotic solutions.
Structure synthesis on-the-fly

Hard foam can be used to synthesise a body on-the-fly, allowing us to spray a body for this quadruped. Each of the limbs comprises three CKBot modules, in a configuration similar to that used in the self-assembly after explosion project.
Search and Rescue

Can small man-portable robots aid the transport of incapacitated victims? This work received the Best Paper Award at the 2009 IEEE International Workshop on Safety, Security, and Rescue Robotics.
XBot

The XBot system is a lattice style modular self-reconfigurable robot that uses external actuation to deterministically reconfigure XBot modules. Using the principle of external actuation facilitates module miniaturization as modules do not require motors or servos to reconfigure.
RATChET

Modules in the Right Angle Tetrahedron Chain Externally Actuated Testbed (RATChET) system can be programmed to form arbitrary shapes. Using an external manipulator to fold the chain under the force of gravity simplifies the module design since they do not require a motor at each joint.
Dysc

The Dysc is a new MAV with counter-rotating rotors that uses gyroscopic moments for attitude control. The two rotors are fixed pitch, eliminating the need for complex mechanisms like the swashplate, leading to lower cost and easier maintenance when compared to traditional helicopter configurations. In addition, the Dysc has the potential for higher agility than quadrotors.
Module Brake

We have designed a joint-locking mechanism for a new chain-style modular reconfigurable robot. This mechanism will enable the robot to perform a wide array of tasks such as dynamic motion and bio-inspired locomotion while consuming less power.
Factory Floor
The factory floor is an experimental robotic system for the construction of passive robotically-reconfigurable truss structures. The macroscopic goal of this work is to embed autonomous reconfigurability into human-built systems.
CKbot

The CKbot (Connector Kinetic roBot) is a chain style modular robot. It is designed to be fast and inexpensive while small enough to fit inside a 3 inch tube. It is manually reconfigurable into any shape while also allowing attachments such as wheels, grippers, IR proximity sensors and camera modules.
Self re-Assembly after Explosion

A car bumper is designed to crumple upon impact and protect the driver. A ski boot will detach from the ski to prevent injury to the ankle. Likewise a CKbot assembly falls apart when it is kicked, however CKbot can put itself back together again.
Dynamic Locomotion of CKBot

CKBot is designed to be fast allowing it to achieve dynamic locomotion. Given that CKBot is reconfigurable gives us the unique ability to research different types of dynamic locomotions in different morphologies all with the same hardware.
Quick Change End Effector

This prototype allows PR2 to change end-effectors on his own. He could trade in his hand for a different gripper, a screwdriver, or even a sensor such as a camera. The quick release mechanism makes it easy for him to attach and detach and it also features electrical connections to transfer power and communication.
Distributed Communication Fault Tolerance

An advantageous feature of modular robots is the applicability to system fault tolerance. With redundant units and parallel processing facilities, modular robots have the capability or potential to account for certain types of failures within its system. This research presents work on communication fault tolerance with CKBot.
Configuration Recognition
The advantage of reconfiguration is central to modular robotic systems. With this benefit, however, comes a complex and interesting challenge: how does a modular robot recognize which shapes are useful or familiar? The ability for a modular robot to determine which configurations are needed for various tasks is a fundamental requirement for increased autonomy.