High-Dimensional Area of Acceptance Using Discrete Methods
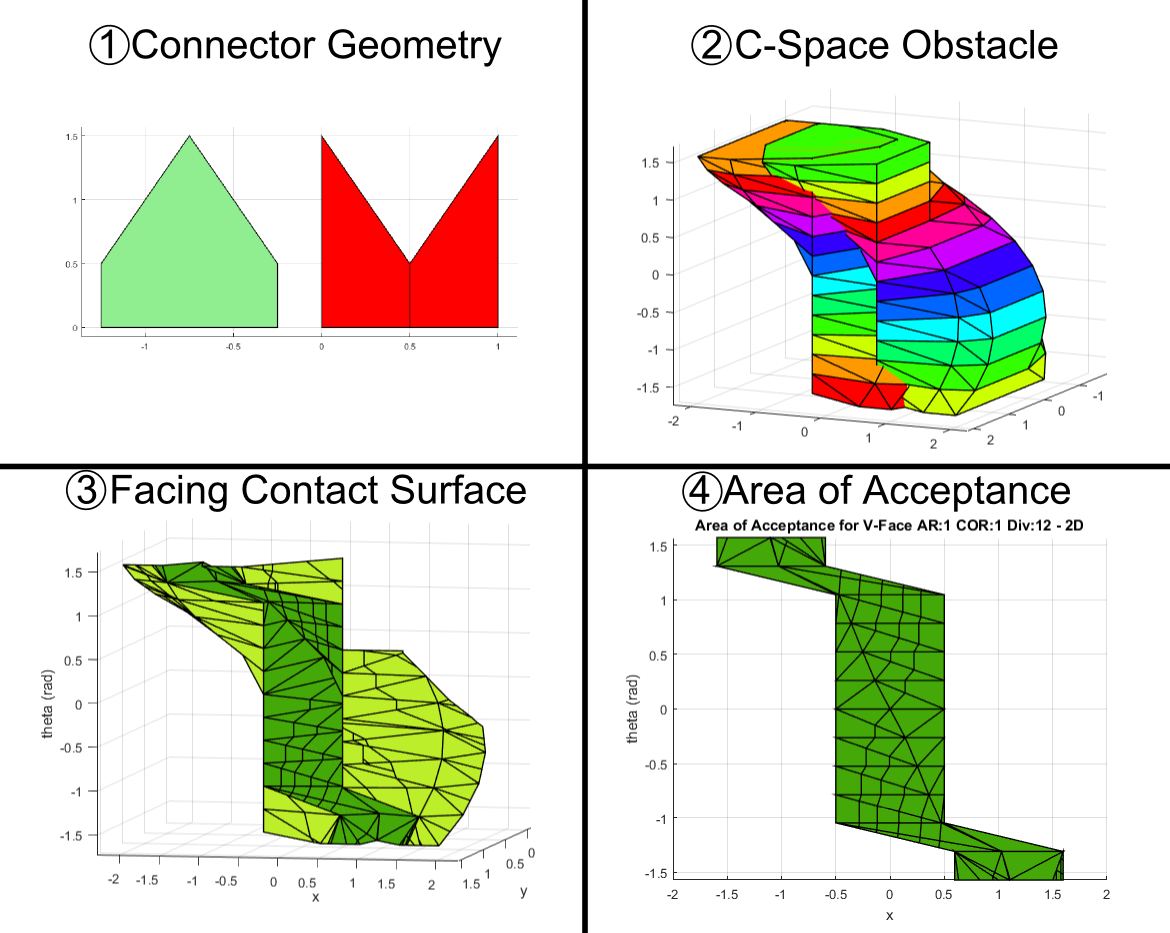
Physical connectors with self-aligning geometry aid in the docking process for many robotic and automatic control systems such as robotic self-reconfiguration and air-to-air refueling. This self-aligning geometry provides a wider range of acceptable error tolerance in relative pose between the two rigid objects, increasing successful docking chances. A new, more discrete flooding method for analyzing …
Read more “High-Dimensional Area of Acceptance Using Discrete Methods”