Andrew Specian

Position: Ph.D. Student
Research Interests: Robotics, Mechanisms, Search and Rescue, Disaster Robotics, Human Robot Interaction, Collaborative Robotic Interaction
Office: modlab
Email: aspecian at seas.upenn.edu
Personal Page
Research Interests: Robotics, Mechanisms, Search and Rescue, Disaster Robotics, Human Robot Interaction, Collaborative Robotic Interaction
Office: modlab
Email: aspecian at seas.upenn.edu
Personal Page
Publications
-
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) A. Specian, R. Mead, S. Kim, M. Matarić, and M. Yim, “Quori: a community-informed design of a socially interactive humanoid robot,” Ieee transactions on robotics, vol. 38, iss. 3, pp. 1755-1772, 2022.
A. Specian, R. Mead, S. Kim, M. Matarić, and M. Yim, “Quori: a community-informed design of a socially interactive humanoid robot,” Ieee transactions on robotics, vol. 38, iss. 3, pp. 1755-1772, 2022.
[Bibtex]@ARTICLE{AS:RM:SK:MM:MY:22, author = {Specian, Andrew and Mead, Ross and Kim, Simon and Matarić, Maja and Yim, Mark}, journal = {IEEE Transactions on Robotics}, title = {Quori: A Community-Informed Design of a Socially Interactive Humanoid Robot}, year = {2022}, volume = {38}, number = {3}, pages = {1755-1772}, doi = {10.1109/TRO.2021.3111718} } - A. Specian, C. Mucchiani, M. Yim, and J. Seo, “Robotic edge-rolling manipulation: a grasp planning approach,” Ieee robotics and automation letters, vol. 3, iss. 4, p. 3137–3144, 2018.
[Bibtex]@article{AS:CM:MY:JS:18, title={Robotic Edge-Rolling Manipulation: A Grasp Planning Approach}, author={Specian, Andrew and Mucchiani, Caio and Yim, Mark and Seo, Jungwon}, journal={IEEE Robotics and Automation Letters}, volume={3}, number={4}, pages={3137--3144}, year={2018}, publisher={IEEE}, doi={10.1109/LRA.2018.2849828} } -
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) A. Specian, N. Eckenstein, R. Mead, B. McDorman, S. Kim, M. Mataric, and M. Yim, “Preliminary system and hardware design for quori, a low-cost, modular, socially interactive robot,” in 2018 hri workshop social robots in the wild, 2018, p. 1–6.
A. Specian, N. Eckenstein, R. Mead, B. McDorman, S. Kim, M. Mataric, and M. Yim, “Preliminary system and hardware design for quori, a low-cost, modular, socially interactive robot,” in 2018 hri workshop social robots in the wild, 2018, p. 1–6.
[Bibtex]@inproceedings{AS:NE:MY:18, title={Preliminary system and hardware design for Quori, a low-cost, modular, socially interactive robot}, author={Specian, Andrew and Eckenstein, Nick and Mead, Ross and McDorman, Braden and Kim, Simon and Mataric, Maja and Yim, Mark}, booktitle={2018 HRI Workshop Social Robots in the Wild}, pages={1--6}, year={2018}, pdf={ https://www.modlabupenn.org/wp-content/uploads/2018/03/Specian_Quori_Hardware_HRI_Workshop_2018.pdf} } - A. Specian and M. Yim, “Friction binding study and remedy design for tethered search and rescue robots,” in 2015 ieee international symposium on safety, security, and rescue robotics (ssrr), finalist for best paper, 2015, p. 1–6.
[Bibtex]@inproceedings{AS:MY:15, title={Friction binding study and remedy design for tethered search and rescue robots}, author={Specian, Andrew and Yim, Mark}, booktitle={2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Finalist for Best Paper}, pages={1--6}, year={2015}, doi = {10.1109/SSRR.2015.7442940}, organization={IEEE} } - L. Grega, M. Kothari, A. Specian, and S. Voinier, “Characterization of flow within a fuel cell manifold subject to asymmetric inlet conditions,” Journal of fuel cell science and technology, vol. 12, iss. 6, p. 61008, 2015.
[Bibtex]@article{AS:15, title={Characterization of Flow Within a Fuel Cell Manifold Subject to Asymmetric Inlet Conditions}, author={Grega, Lisa and Kothari, Manthan and Specian, Andrew and Voinier, Steven}, journal={Journal of Fuel Cell Science and Technology}, volume={12}, number={6}, pages={061008}, year={2015}, publisher={American Society of Mechanical Engineers} }
Projects
Robotic Edge-Rolling Manipulation: A Grasp Planning Approach

We present a novel robotic manipulation technique that we call robotic edge rolling. It refers to transporting a cylindrical object by rolling on its circular edge, as human workers might maneuver a gas cylinder on the ground.
Quori: A Community-Driven Modular Research Platform for Sociable Human-Robot Interaction
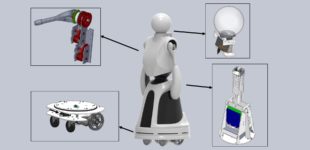
Quori is a novel, affordable, socially interactive robot platform for enabling non-contact human-robot interaction (HRI) research in both in-lab and “in the wild” experimental settings. The package will be complete with an expressive projected face, two gesturing arms, bowing spine, and an omnidirectional base. Software is provided at the low-level to control the hardware and at the high-level, provided by Semio, to easily generate versatile social behaviors.